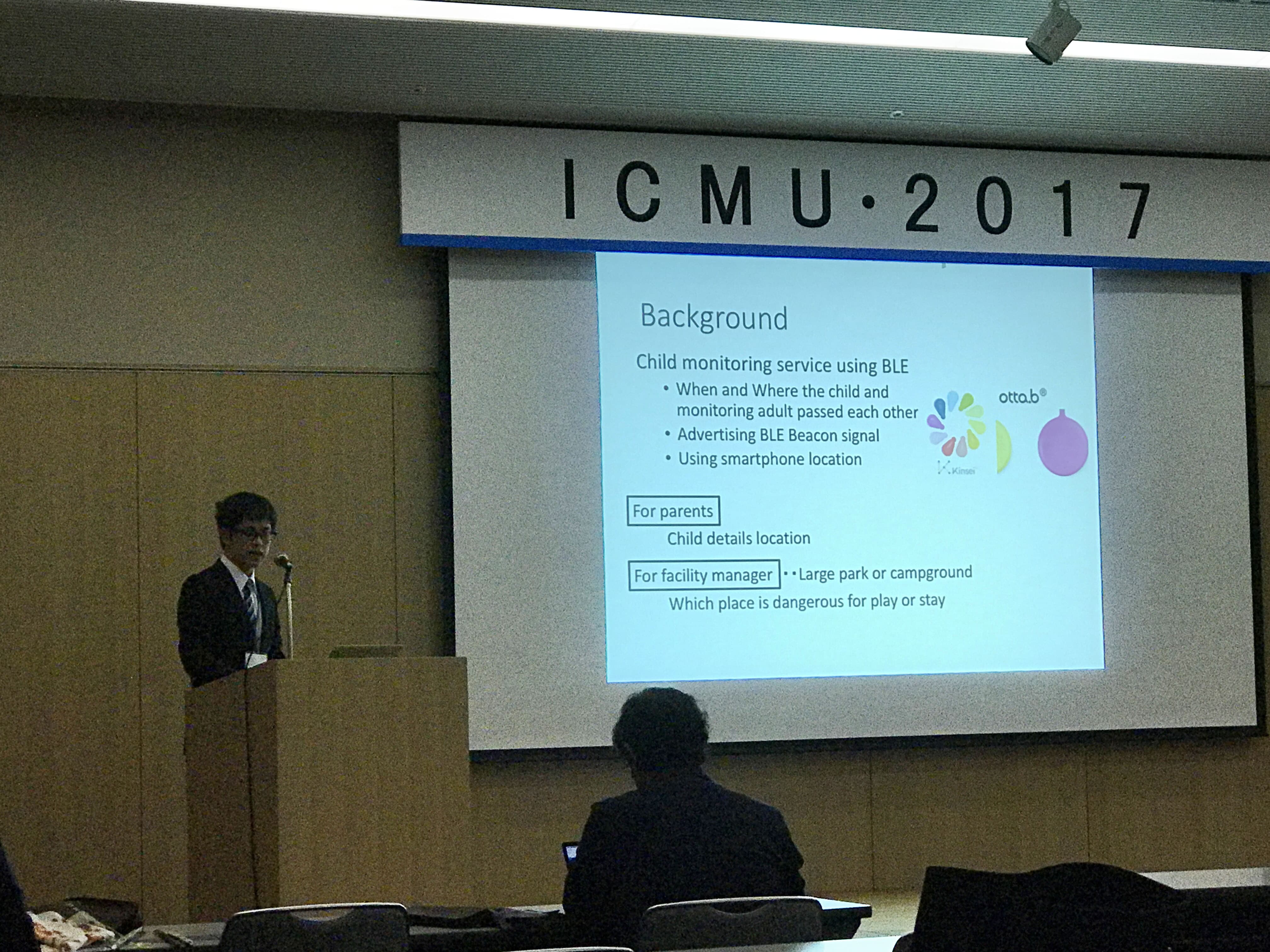
気が付けば2021年も残り少しですね. M1の大鐘勇輝です. 11月17日〜19日の日程で開催されたICMU2021にて,研究発表を行ってきましたので報告したいと思います. 今回発表した論文のタイトルは「Monitoring Wheelchair Users in Care Facilities with BLE Beacons Attached to Wheels」で,簡単に説明するとBLEビーコンを使用して車椅子使用者のモニタリング(自走・介助の判定,活動量の可視化)を行うという研究です. 下記に研究概要を載せておきますので,研究について詳しく知りたい方はそちらをご覧ください.
Ogane, Y., Enokibori, Y., Katsuhiko, K., Monitoring Wheelchair Users in Care Facilities with BLE Beacons Attached to Wheels, International Conference on Mobile Computing and Ubiquitous Networking(ICMU2021), 2021.
研究概要
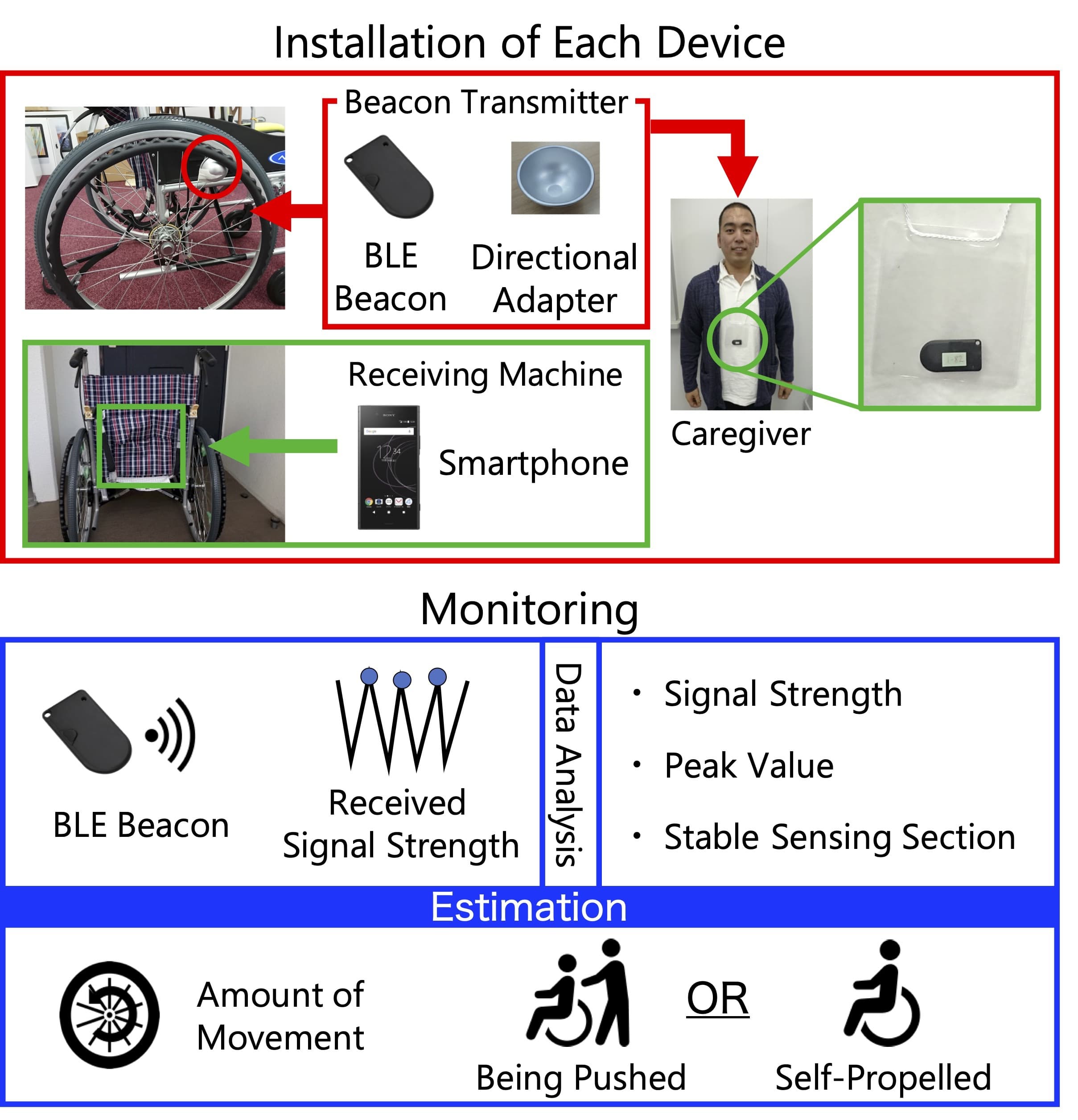
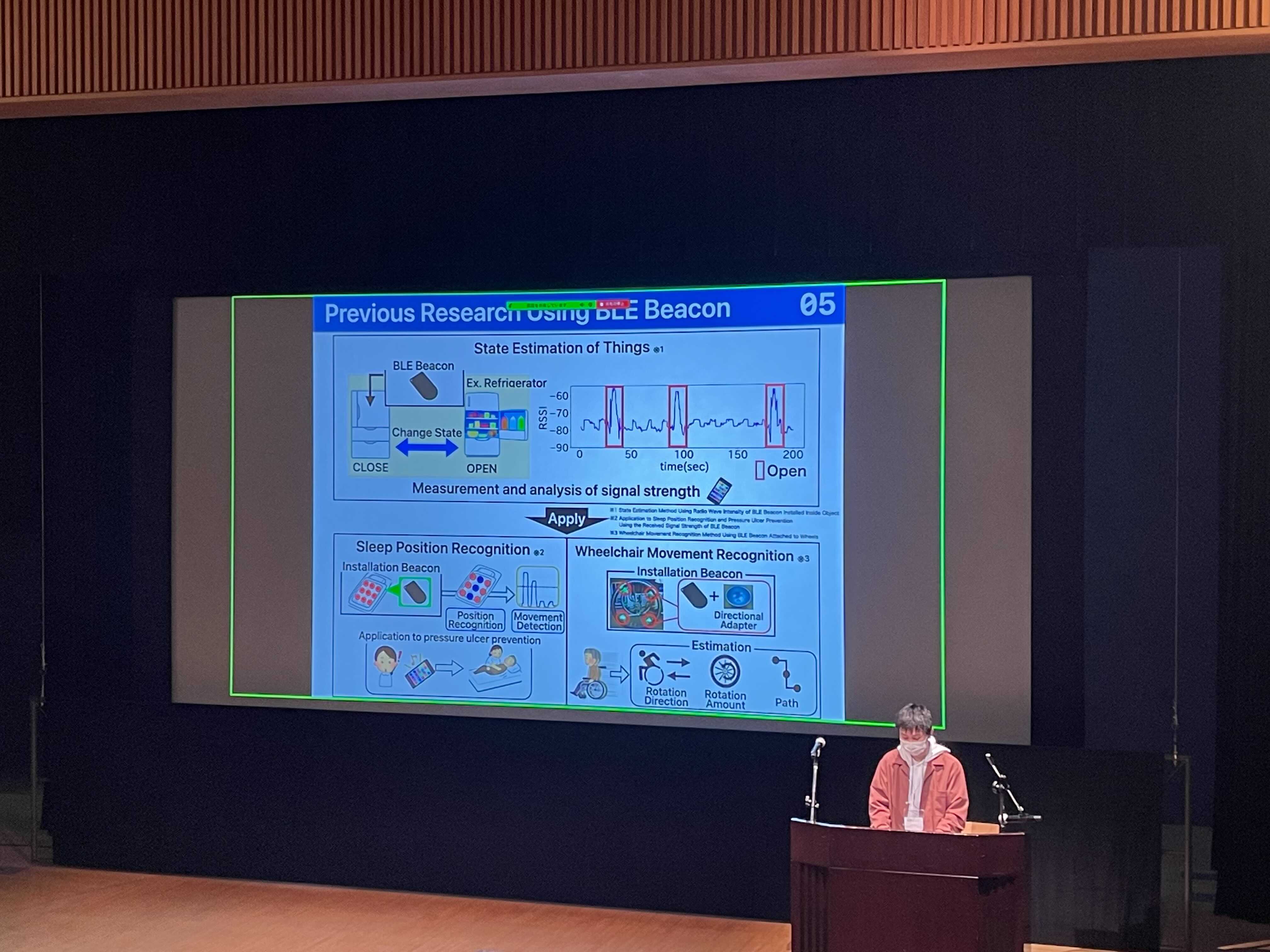
As the human life span continues to increase due, the shortage of caregivers in nursing homes has become critical. In elderly nursing homes, health is maintained by good nutrition, physical rehabilitation, and the monitoring of many daily tasks that require assistance. Various methods were proposed in previous human-monitoring studies, including acceleration sensors and changes in power consumption. Unfortunately, these techniques do not apply to wheelchair users, and the costs of introducing and operating them are high. In this research, we develop a low-cost monitoring method for wheelchair users that uses BLE beacons that determine the amount of wheel rotations and whether the user is being self-propelled or pushed. Since the radio waves transmitted by BLE beacons are weak, the radio wave strength can be easily changed by the distance and direction of the receiver. Using this receiver feature, we installed a BLE beacon to the wheels of a wheelchair and the uniforms of caregivers and estimated their movements from the changes in the strength of the received radio waves. Using the proposed method, we estimated the number of wheel rotations with 100% accuracy and distinguished between self-propelling and being pushed with 93.0% accuracy.
感想と参加報告
今年のICMU2021はオンラインとオフラインのハイブリッド形式での開催となりました. オフラインで発表する場合の会場は,東京のお台場にある日本科学未来館だったので,久しびりに新幹線に乗っての移動となりました. ICMU自体は11月17日〜19日の日程ですが,今回は前日入りしての参加だったので16日に名古屋を出発し東京に向かっています. この日は天気も良く新幹線から綺麗な富士山が見えました.
新幹線から見えた富士山

日本科学未来館

地球儀のやつが有名なのでこれで分かる人多いかも (自分が行ったときはメンテナンス中で見れませんでしたが…)

ICMU1日目
ICMU1日目と2日目は自分の発表はないので,運営のお手伝いと他の発表者の発表を聞く感じでした. 運営のお手伝いでは主に受付を担当してましたが,そこまで忙しいお仕事ではなかったのでZoom上で他の人の発表を観ながらやっていました. その中で気付いたのですが,ほとんどの発表者が英語が上手で質疑応答も難なくこなしていました. 私は英語を話すのが得意なわけではないので,それを観て「凄いところに来てしまったな…」と思ってました. ちなみに,発表会上は以下の写真の部屋だったのですが,観てもらって分かる通りむちゃくちゃカッコいい会場でした.
発表会場

お昼ごはん
お昼ごはんは運営の方で用意してくれており,3種類の中から好きなのを選んで食べる感じでした. 下の写真はICMU3日目に食べた和牛弁当です. ちなみに2000円台のお弁当らしいです(凄く美味しかったです).


レストランで使用できる食事券
今回のICMUでは会場内のレストランで使用できる680円のお食事券が1人18枚も配られました. なので,空いた時間でおやつとかが実質食べ放題という感じでした. 下の写真のアイスとチュロスとコーラは毎日食べてました:)

レストランはむちゃくちゃ景色がよくオシャレな感じでした

ICMU2日目
2日目も僕の発表はないので,動きとしては1日目とほぼ同じ感じでした. ただ、チームラボの展示と技術討論会という名の夕食会があったので旅行気分が味わえました.
チームラボボーダレス
チームラボとはデジタル技術を駆使した「デジタルアート」を制作・展示する集団のこと https://borderless.teamlab.art/jp/
色々な作品があったけれど個人的にサーチライトを使った作品が一番のお気に入り


技術討論会(夕食)
夕食の会場は「Trattoria Pizzeria LOGIC お台場」というイタリアンのお店. 店内からはレインボーブリッジや東京タワーを見渡すことができ,とてもオシャレでした.

ICMU3日目
3日目はついに私の発表日でした. 他の人の発表を見る限り,ほぼ全員がスラスラ英語で質疑応答できていたのでかなりプレッシャーでした. しかし意外にも緊張はあまりしておらず,発表自体は大きなミスなく終えることができたので良かったです(Zoomで配信しながらプロジェクターにも映すという都合上、セッティングで詰まってる人が多かったので). ただ,質疑応答では1人目の質問は聞かれると思ってた質問がそのまま来たのでなんとか答えられましたが,それ以降の質問は英語で上手く伝えられなかったり,そもそも質問内容を正しく理解できていませんでした. 英語力って大事だなととても痛感しました.
発表後
打ち上げがてらレストランで余ってた券を使って豪遊してました (カロリーやばい)

東京駅まで行ってお土産を買いました.

ICMUのまとめ
論文執筆からスライドの作成、発表までやることが多くて大変だったけど久しぶりに現地で発表できたので良かったです. 英語発表は大変だけど現地で発表できると良い思い出がたくさん作れるので,みんなも院進して英語発表しよう!!
あと,今回は新しく買ったPixel6 Proで写真を撮ってますが,かなり画質が良いのでオススメです.